CS 563 Advanced
Topics in
Computer Graphics
Rendering of Human Hair
by Curt
Ferguson
|
Introduction
Modeling human characteristics is one of the most difficult
and challenging issues in today’s computer
graphics. One of the most difficult
characteristic is the modeling of realistic hair.
In the late 1980s new techniques appeared
in an effort to create realistic hair
models. These models were only for creating
furry objects, such as teddy bears, and
spiders. By using variations of these
techniques it is possible to create
realistic hair models.
Why develop a method
for rendering Human Hair?
Photorealistic human images depend largely on realistic hair.
Problems:
Given the extremely large total number of hairs on a human head,
obtaining results within a reasonable amount of time proves difficult.
The 3d shape of hair is complicated. With conventional methods an
enormous number of patches are required to render even a simple
hairstyle.
|
 [4] [4] |
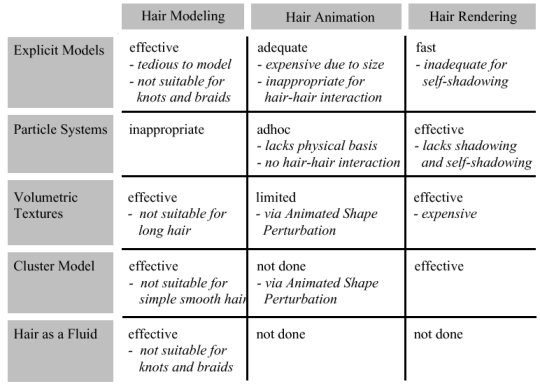
Current
techniques
There are currently 5
techniques used for hair rendering [4].
-
Explicit Models
-
Particle systems
-
Volumetric
Textures
-
Cluster Models
-
Fluid Models
|
 |
Explicit Model
-
A differential equation
method is used for modeling the aesthetic features of human hair.
-
A cantilever beam
simulation is employed for hairstyle modeling, which allows hairdressing
variations with volumetric and realistic appearance.
-
the dynamical behavior of
hair as an animation is described through one-dimensional projective
differential equations of angular momenta
-
Individual hairs are
represented as linked rigid sticks.
-
A "rough"
approximate solution is provided for collision detection between hair and a
human head by solving the projective equations under a pseudo-force field.
-
The hair’s pliability
can be controlled by using a set of stiffness parameters in the method.
-
Blinn’s specular model
is used as a fast rendering technique.
Prior knowledge
Prior knowledge on
hairstyling is the hairstyle modeling
techniques and steps involved in actual styling. When
we are creating a method to model hairstyling, both artificial and intrinsic
properties must be considered. In the hair styling of real hair a
stylist uses many artificial techniques, such as shearing, perming and combing,
to get the desired hairstyle. The
intrinsic properties of the desired hairstyle are selected. These are either
added or already included, as the natural and physical properties of the hair
(color, width, pliability and volumetric appearance).
Modeling
Physically based modeling approaches are not considered. The
reasoning is that physically based modeling
approaches contain to many variables. In particular it is impossible to
numerically treat self-interaction or collision detection of a large amount of
hair, typically tens of thousands. For this reason, the hair is
approximated as a series of cantilever beams.
Modeling Steps
Differential equation
governing cantilever beam deformation:
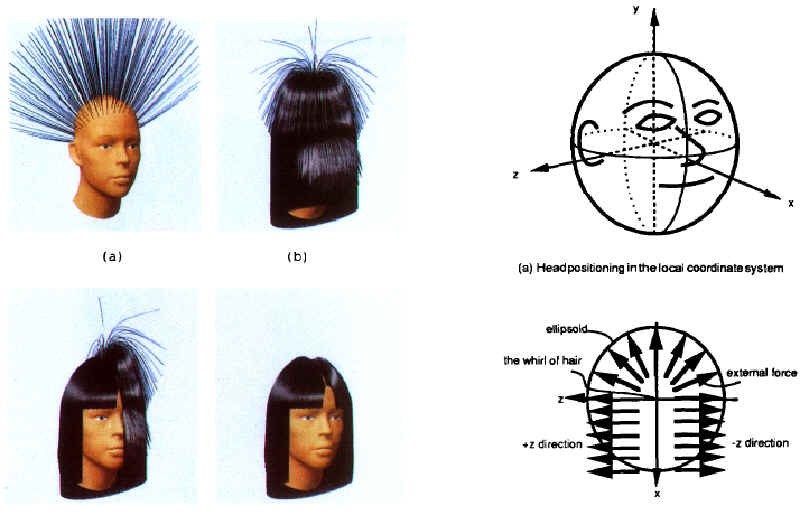
Part 1: Define
an ellipsoidal hull of the head model, which can be considered as a rough
approximation to the head. Then also specify the region of hair pores on the
ellipsoid.
Part 2: Calculate
hair bending, based on a simplified simulation of a cantilever beam. This
process also includes collision detection between each hair and the ellipsoid.
Part 3: Cut
hair and modify with slight adjustment, in order to get the desired shape in
the final stage.
Ellipsoidal
Approximation
Advantages of Ellipsoidal
Approximation:
-
A polar coordinate
system is available for an ellipsoid.
-
Polar coordinates are
an easy way to specify the hair locations for an ellipsoid.
-
An ellipsoid also has
the benefit of allowing collision detection at a low computational cost.
Compared to polygonal
models:
-
A regular polygonal
representation does not have an easy method of specifying locations.
-
Regular polygonal
models have an inherently large polygon count.
-
Regular polygonal
models require collision detection for each polygon.
|
Hair Bending
Calculations for hair bending are performed as a simplified simulation of a
cantilever beam. Collision
detection between each hair and the ellipsoid is also calculated
A cantilever beam is a straight beam with a
fixed support on one-side. To understand how to calculate the bending of an individual hair we must
first look at it in two dimensions. We are going to use a cantilever beam
representation for the hair.
|
 [2] [2] |
Calculate Hair
Bending
A uniformly distributed external force g (gravity) is applied to the beam.
This produces a bending moment and
shearing force. Due to the small size
of the beam, the shearing force can be ignored. The x-axis of the lever is
along the initial beam direction. The
y-axis is vertical to the direction of the applied force. The y-axis
represents the deflection direction of the beam. (Also considered the amount of
sag for the beam)
Cantilever Beam
Equation of Deformation
Process
 [Anjyo et al]
[Anjyo et al]
E is Young's modulus
(Stress/strain)
I denotes the second
momentum of area.
M is the bending
moment per unit length (torque).
E*I is the
flexural rigidity of the beam. This value depends on the material of which the
beam is composed.
As with the shearing force, this equation does not consider large
deformations. It is still valid for the deformation of hair though, as the
hair is broken up into segments, each of which have little deformation.
The beam is separated into a finite
number of linear segments with uniform lengths. The distributed load g is
approximated by the sum of segmentally averaged concentrated loads. [Anjyo
et al]
[Anjyo
et al]
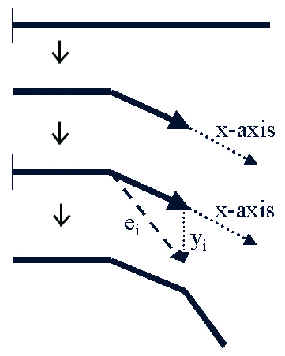
The cantilever beam formula is further simplified by holding the
bending moment constant. Below, the dotted line is a physically accurate
bending moment at x, while the solid lines are approximated positions.
 [Anjyo
et al]
[Anjyo
et al]
Cantilever Beam
Approximation Formula
 to
to  are the node vectors of the hair segments.
are the node vectors of the hair segments.  is the constant bending momentum on segment
is the constant bending momentum on segment  .
.

The displacement  of
the node
of
the node is
is

Next, the two-dimensional method is applied in three dimensions.
Three Dimensions
| Two dimensions |
Three dimensions |
 |
 |
To
do this, we must create a new coordinate system. The a0 axis corresponds to the
x-axis that is described in the two dimensional case.
-
a0 axis is defined as the
the segment vector pi-2 -> pi-1.
-
Point p*i is placed a
certain distance along the a0 axis.
-
Reference point p*i-1 is
set at a known distance from pi-1.
-
The a1-axis is vertical
to the a0-axis on the plane spanned by these three points.
-
The a2-axis is orthogonal
to both axis.
-
Apply the two dimensional
method to obtain the deflections y1 along the a1-axis and y 2 along the a
2-axis. These deflections are obtained by using the respective component of
the force.
-
The desired deflection of
the vector yi is obtained as y1a1 + y2a2.
Collision Detection
Collision detection is also
considered, but only between the hair and the head model, not between the
individual hairs. Anywhere from 100,000
to 400,000 individual hair segments and roughly 10,000 polygons are typically
considered sufficient to model hair. To
calculate the collisions between a large amount of hair segments and polygons
would require a high computational cost. This is where the ellipsoidal
approximation comes in. Any new
points are checked to see if they lie inside the ellipsoid. If so, the point is
simply moved to the outside of the ellipsoid.
Hair Styling
Hair is cut by restricting the beam length of polar coordinate regions
to the desired hair lengths. Hair is combed by adding additional
external forces.
 [Anjyo
et al]
[Anjyo
et al]
|
Dynamic
Behavior
A physics based model
of hair properties is not optimal. This is primarily
due to the number of unknown functions in the derived differential
equations need to recreate all the physical properties. Another
problem with a physically based model is the problem of dealing with the
self-interaction between individual hairs, such as collision detection.
The number of calculations that are
needed for these types of interactions between thousands of individual
hairs are such that it would be infeasible to use a physically based model
system
To simplify the process the
inter-hair collisions are disregarded . By doing so we able to greatly
lower the number of computations needed in order to recreate the behavior
of hair. We are also able
to derive simple differential equations that avoid dealing with physically
rigorous formulation, and only consider visual representations of the
hair.
The
dynamic behaviors of inertial
momentum, hair stiffness, and dynamic
collision are considered.
|
 [Anjyo
et al] [Anjyo
et al] |
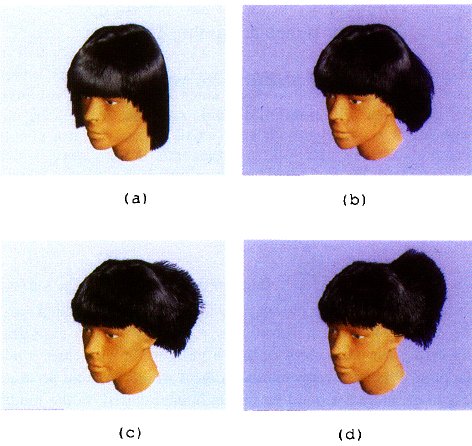
Inertial Momentum
Inertial momentum is an
external force which can be applied over time and in varying amounts across the
ellipsoid, giving the illusion of friction. In the 4 pictures below, four
images over time were taken of hair with inertial momentum.
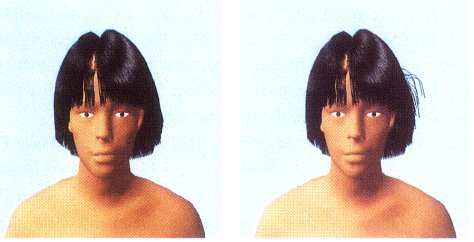
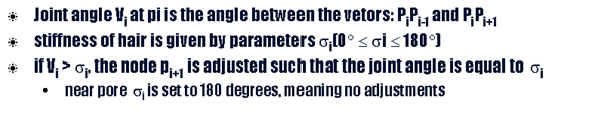
Stiffness
The equations for finding the
physical properties that simulate stiffness in hair are displayed below.
This is a simple process of controlling how
much of a deformation angle the hair is allowed to bend. The head on the
right has a tuft of hair with higher stiffness the than rest, resulting in it
extending further.
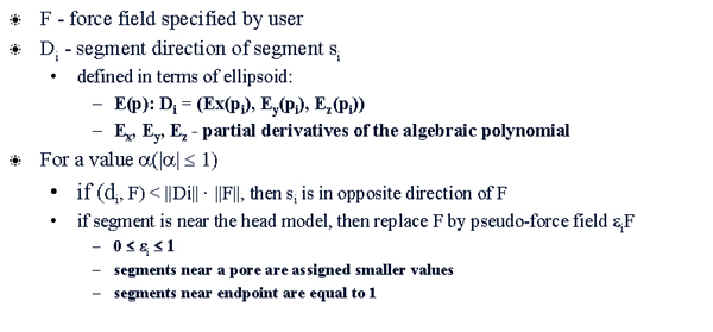
Pseudo-force field
A pseudo-force field is used to resolve dynamic collision avoidance.
This is done to keep the hair from colliding
with the head during an animation. Considered
another external force
 [2] [2] |
The pseudo-force field is used to limit the effect that an external force has
on the hair. The closer the
hair is to the head model the greater the pseudo-force is. This
method eliminates collisions between the hair and the head model.
Rendering Techniques
The two techniques I saw used
to render hair are ray tracing with Blinn's specular model and the Trigonal
Prism-Based Method. Blinn's specular model is designed to handle
ray collisions with round objects. As each
hair segment is a cylinder with a very small radius, it works well. The
disadvantage of this method is that shadowing
effect is disregarded. The Trigonal
Prism-Based Method represents each hair segment as a prism shaped cylinder, so
can be modeled as 3 patched rectangles. This method has the advantage of
using standard z-buffering techniques for
rendering speed, but is not as detailed as ray tracing with Blinn's specular
model.
Conclusion
The paper by Anjya et al included much work on modeling the aesthetic features
of human hair, focusing on hairstyling and dynamics. However,
it does not emphasize the rigorous physics necessary for modeling, instead using
differential equations as the visual analogies. Watanabe
and Suenaga grouped multiple hairs
into wisps, and represented the wisps as triangular patches. This
technique is does not achieve the same realism as Anjya et al, but grouping of
hairs that will bend in the same direction greatly reduces the number of beams
that must be solved for. For anyone wishing to realistically render human
hair, the methods of these two papers should provide all the information needed.
References
[1]Ken-Ichi Anjyo,
Yoshiaki Usami, and Tsuneya Kurihara, "A Simple Method for Extracting the
Natural Beauty of Hair", Proc. ACM SIGGRAPH 1992 ACM
Paper Page
[2]K Babic,
"Modeling Human Hair" CS 563 1999 Presentation Presentation
Online
[3]R. Lu, J. Koederink
and A. Kappers, "Specularities on Surfaces with Tangential Hairs and
Grooves", IEEE International Conference on Computer Vision, pp. 2-7, 1999 IEEE
pdf file
[4]N. M. Thalmann, S.
Hadap, P. Kalra, State of the Art in Hair Simulation, International Workshop on
Human Modeling and Animation, June 2000, Korea Computer Graphics Society, pp.
3-9 pdf
file
[5]Yasuhiko
Watanabe, and Yasuhito Suenaga, "A Trigonal Prism-based Method for Hair
Image Generation", IEEE Computer Graphics and Applications, January 1992:
47-53 IEEE CG&A Paper Page